Géophysique marine
Le plateau de Géophysique marine comprends deux profileurs sismiques à très haute résolution (IKB Seistec et Echoes 5000), un récepteur GPS Topcon, un système d’acquisition et traitement Delph Seismic, un PC marinisé de terrain et un sonar bathymétrique monofaisceau (Tritech PA500).
Profileur sismique IKB Seistec (Fig. 1)


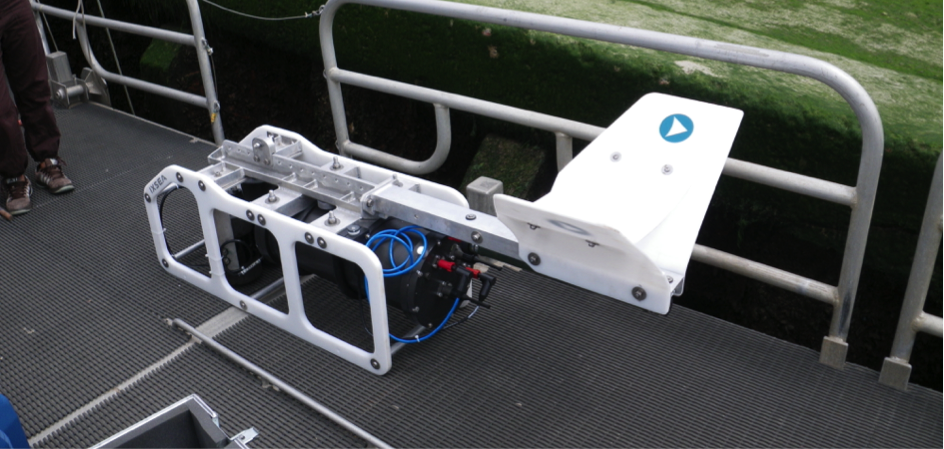
Le profileur IKB Seistec a été conçu par Peter Simpkin (Simpkin and Davis, 1993). Il comprend un catamaran équipé de deux flotteurs sur lequel sont montés, une source comprenant une plaque boomer (transducteur électro mécanique IKB Model-3B, Simpkin, 2005, Figs. 1 et 2), délivrant des signaux entre 1 et 10 kHz et une flute comprenant sept hydrophones, montée verticalement dans une parabole (Figs. 3a et b et 4).



Cette géométrie d’acquisition permet d’assurer un très faible offset entre la source et le récepteur, autorisant ainsi la prospection dans des très faibles tranches d’eau (jusqu’à 1,5 - 1,8 m dans la pratique). La parabole permet d’atténuer les échos latéraux, l’onde directe et les multiples.
L’alimentation en énergie de la plaque Boomer est assurée par une source haute tension Energos (SIG) 50 ou 150 joules (Fig. 5 et 6) à laquelle on doit brancher un boitier anti retour également conçu par SIG (Fig. 5 et 6). La cadence de tir est typiquement de 0,5 à 0,25 secondes. La réception et le traitement des signaux analogiques sont réalisés par un ampli filtre (SPA-3a s/n 020, Fig. 5 et 6). Les signaux analogiques sont ensuite digitalisés par un PC terrain équipé du logiciel Delph Seismic Acquisition (Fig. 5 et 6).
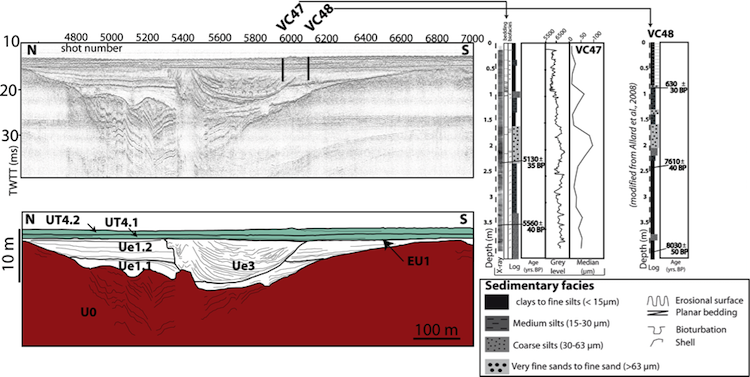
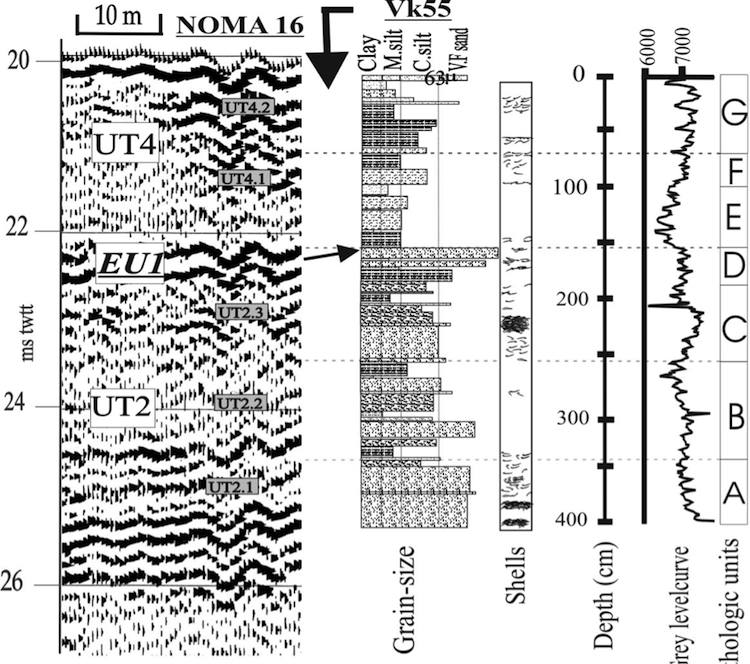
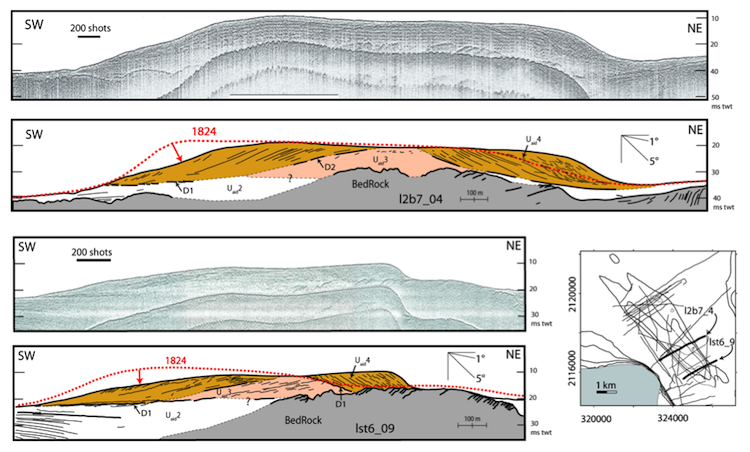
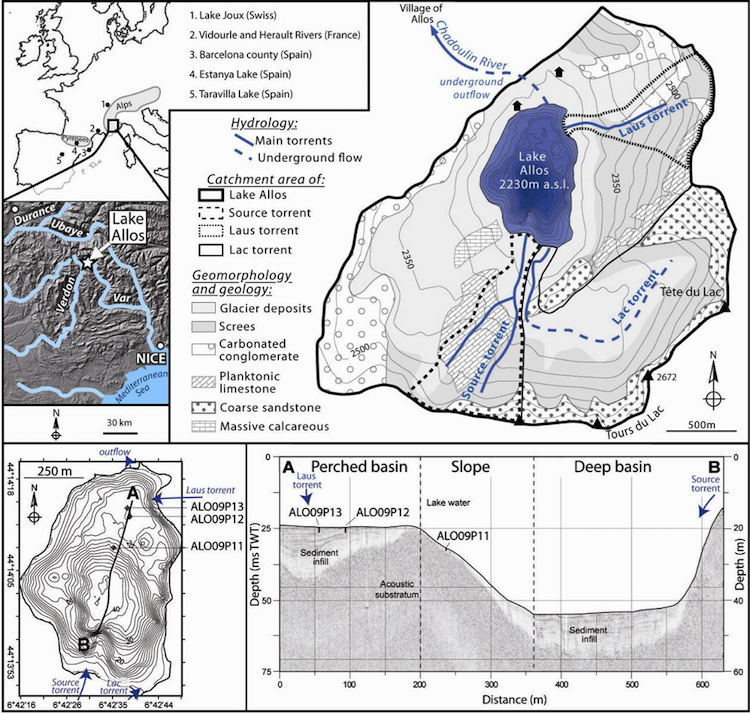
L’IKB Seistec permet à la fois d’obtenir des images sismiques de très haute résolution dans des zones très peu profondes (Fig. 7), de réaliser des corrélations décimétriques avec des carottages sédimentaires (Fig. 8 et 9), de pénétrer dans des bancs de sable (Fig. 10) malgré la densité des sédiments.


Profileur sismique Echoes 5000 (Fig. 11 et 12)

Le profileur Echoes 5000 a conçu par iXblue. Ce profileur utilise une source de type « chirp sonar », comprenant 3 transducteurs Janus Helmholtz (Figs. 11, 12), avec des fréquences variant de 2 à 6 ou 2 à 8 kHz et centrées sur 5 kHz. Les récepteurs consistent en 3 hydrophones montés dans une flute courte et horizontales, sous deux ailerons stabilisateurs (Fig. 11). Sources et récepteurs sont montés sur un poisson de 1835 x 700 x 800 mm pour un poids dans l’air de 83 kg. Le poisson communique via un câble électro porteur (Fig. 12) avec une boite de pont (« black box », Fig. 13 et 14), elle même pilotée depuis un PC portable (Fig. 14). L’alimentation en énergie de la source est assurée par la boite de pont. La cadence de tir est typiquement inférieure à 0,5 secondes. La puissance et la spectre de la source peuvent être adaptés aux profondeurs d’investigations.
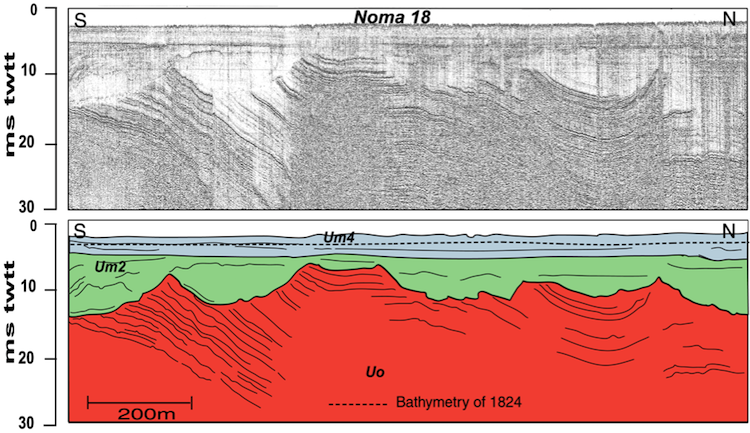
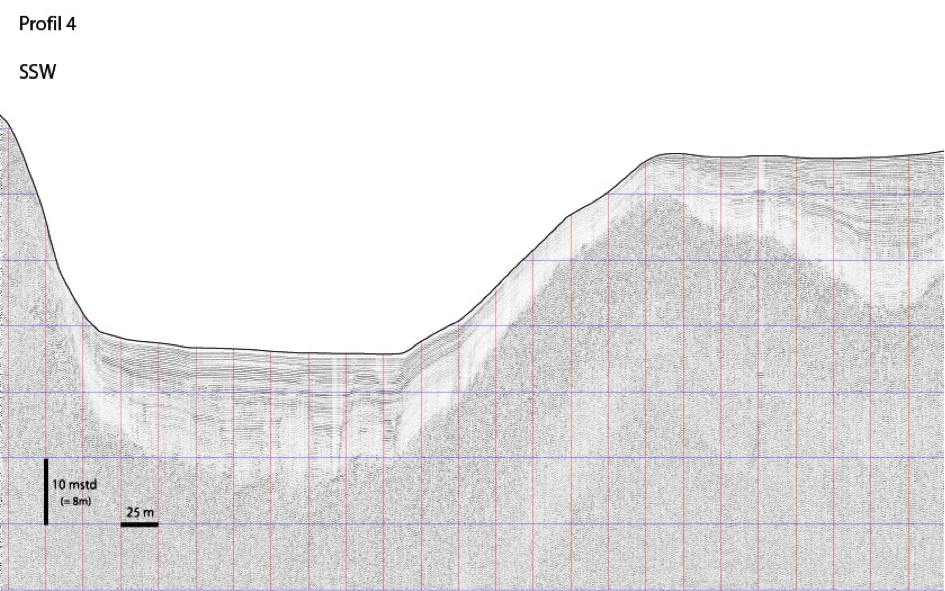
Les relativement petites dimensions de l’Echoes 5000 et ses faibles besoins en énergie permettent de n’utiliser q’un petit groupe électrogène de 2kwa et de réaliser des véritables prospections sismiques à partir de très petites embarcations (Fig. 15a et b) avec des pénétrations de plusieurs mètres à dizaines de mètres (Figs. 16 et 17).




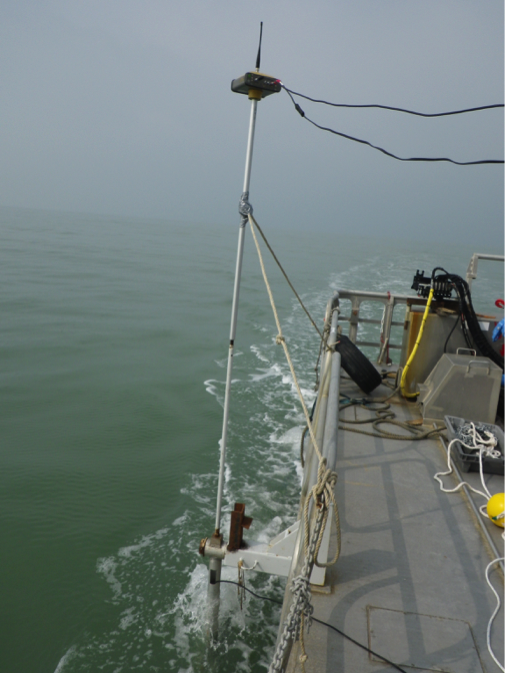
Sonar bathymétrique monofaisceau

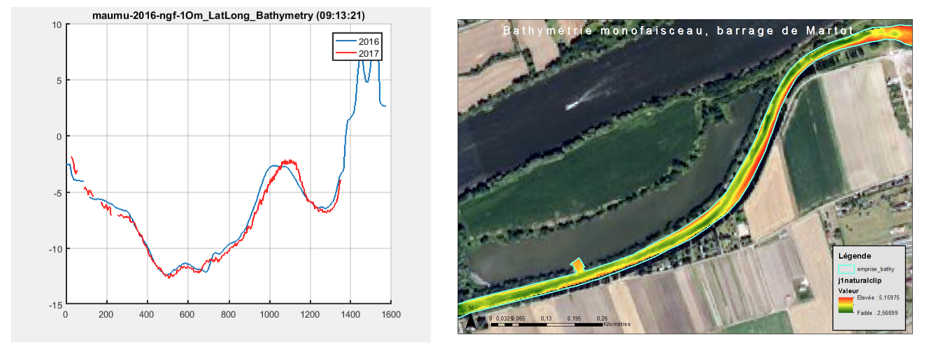
Le sondeur utilisé au laboratoire est un Altimètre monofaisceau monofréquence : Tritech PA500. De conception simple et robuste, une simple alimentation 12v permet de mettre en marche l’instrument et d’obtenir une donnée brute. Sa fréquence de 500Khz permet de sonder entre 0.3 et 50m à une fréquence de 10 mesures par seconde.
Un GPS (Topcon Hiper Pro, SpectraPrecision SP80) est associé au sondeur et permet de positionner correctement la profondeur mesurée ainsi que corriger les variations d’altitudes du plan d’eau liées à la marée ou aux vagues.
Les données du sondeur et celles du GPS sont envoyées vers le logiciel de bathymétrie Hypack. Le module de post-traitement permet de modifier la valeur de célérité du son dans l’eau, éliminer les sondes aberrantes ou encore corriger les offsets d’installation.
Dans le mode d’acquisition des données couramment utilisée, la donnée GPS est post traitée via rtklib, puis combinée à la série temporelle du sondeur par recalage temporel sur matlab.